 STECHOQ TRAINING CENTER
STECHOQ TRAINING CENTER
02. CONTOH SISTEM KENDALI
Contoh Sistem Kendali
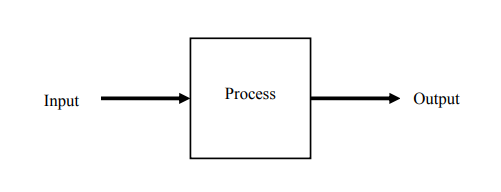
Sistem kontrol adalah komponen-komponen yang saling terhubung yang membentuk konfigurasi sistem yang akan memberikan respon sistem yang diinginkan. Dasar analisis suatu sistem adalah landasan yang diberikan oleh sistem linier, yang mengasumsikan adanya hubungan sebab akibat bagi komponen-komponen suatu sistem. Sebuah komponen atau proses yang akan dikendalikan dapat direpresentasikan dengan sebuah blok seperti yang ditunjukkan pada Gambar di bawah ini.
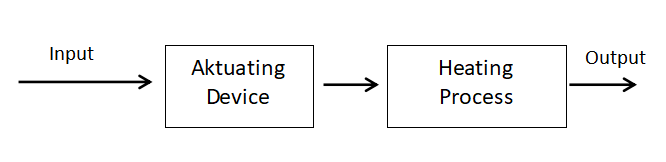
Sistem kontrol loop terbuka menggunakan pengontrol atau aktuator kontrol untuk mendapatkan respon yang diinginkan seperti pada gambar di bawah ini. Sistem kontrol loop terbuka menggunakan alat penggerak untuk mengontrol proses secara langsung tanpa menggunakan alat. Contoh dari sistem kontrol loop terbuka adalah pemanggang roti listrik.
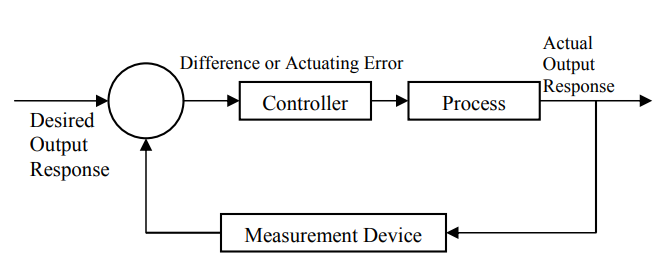
Sistem kontrol loop tertutup menggunakan ukuran tambahan dari output aktual untuk membandingkan output aktual dengan respons output yang diinginkan seperti ditunjukan pada gambar di bawah ini. Ukuran output disebut sinyal umpan balik. Sistem kontrol umpan balik adalah sistem kontrol yang cenderung mempertahankan hubungan antara satu variabel sistem dengan variabel sistem lainnya dengan membandingkan fungsi dari variabel-variabel tersebut dan menggunakan perbedaannya sebagai alat kontrol. Ketika sistem menjadi lebih kompleks, keterkaitan banyak variabel yang dikendalikan dapat dipertimbangkan dalam skema kontrol. Contoh sistem kontrol loop tertutup adalah seseorang yang mengemudikan mobil dengan melihat lokasi mobil di jalan dan melakukan penyesuaian yang sesuai.
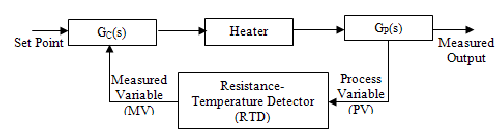
1. TEMPERATURE CONTROL SYSTEMS
Gambar di bawah ini menunjukan diagram kontrol suhu pada tungku pemanas. Suhu pada hasil proses tungku pemanas (Gp(s)) diukur dengan sensor RTD yang kemudian diumpan-balikan dan dibandingkan dengan Setpoint, jika terdapat selisih antara pembacaan sensor dengan setpoint maka kontroller (Gc(s)) akan mengirimkan sinyal untuk menyalakan heater yang kemudian menjalankan proses pemanasan pada tungku pemanas (Gp(s)), Begitu seterusnya sehingga tidak terdapat selisih/error antara pembacaan sensor RTD dengan setpoint.
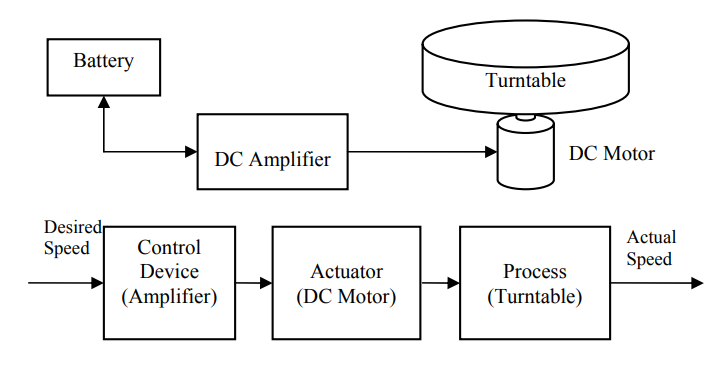
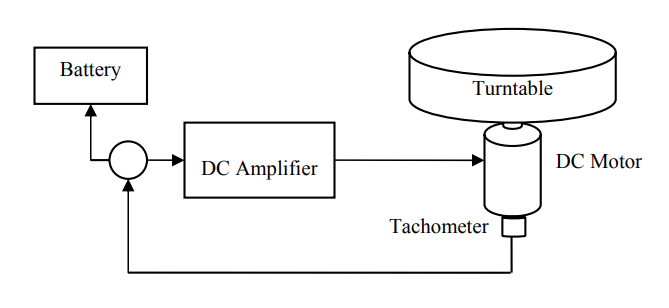
2. TURNABLE SPEED CONTROL
Gambar di bawah ini merupakan model diagram blok kendali loop terbuka kecepatan meja putar.
Dan berikut adalah Kontrol loop tertutup dari kecepatan meja putar.
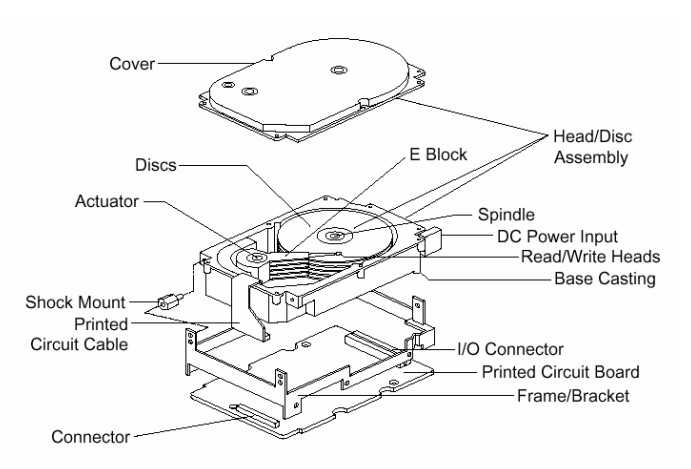
3. DISK DRIVE READ SYSTEM
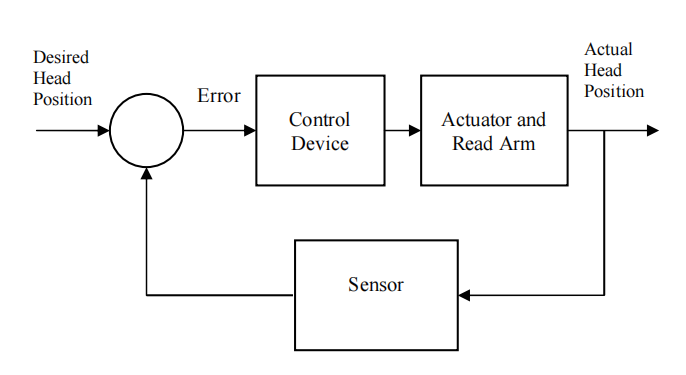
Sebuah hard disk menggunakan piringan bulat dan pipih yang disebut cakram/disc, yang kedua sisinya dilapisi dengan bahan media khusus yang dirancang untuk menyimpan informasi dalam bentuk pola magnetik. Piring dipasang dengan membuat lubang di tengah dan menumpuknya ke poros. Piring berputar dengan kecepatan tinggi, digerakkan oleh motor spindel khusus yang terhubung ke spindel. Perangkat baca / tulis elektromagnetik khusus yang disebut "Head" dipasang ke penggeser dan digunakan untuk merekam informasi ke disk atau membaca informasi darinya. Penggeser dipasang ke lengan, yang semuanya terhubung secara mekanis menjadi satu rakitan dan ditempatkan di atas permukaan disk oleh perangkat yang disebut aktuator. Papan logika mengontrol aktivitas komponen lain dan berkomunikasi dengan bagian komputer lainnya. Untuk lebih jelasnya lihat gambar di bawah ini:

4. WATT'S GOVERNOR / SPEED CONTROL SYSTEM
Ketika beban pada mesin berkurang, kecepatan mesin dan kecepatan sudut poros meningkat. Gaya sentrifugal pada bola meningkat yang menyebabkan bola cenderung bergerak ke luar dan lengan bergerak ke bawah. gerakan ke bawah dari sliding ring menggerakan mekanisme yang mengoperasikan katup throttle di ujung tuas sehingga "Butterfly valve" akan bergerak menutup dan mengurangi pasokan bahan bakar. dan Output daya pun berkurang.
Ketika kecepatan mesin berkurang karena beban pada mesin meningkat, gaya sentrifugal berkurang. Hasilnya adalah Bola akan bergerak ke dalam dan menggerakan sliding ring ke atas. gerakan tersebut menyebabkan pembukaan katup Throttle yang lebar. peningkatan pasokan bahan bakar juga meningkatkan putaran mesin.
Last modified: Friday, 11 August 2023, 3:33 PM
