 STECHOQ TRAINING CENTER
STECHOQ TRAINING CENTER
03. SISTEM KENDALI LOOP TERTUTUP DAN SISTEM KENDALI LOOP TERBUKA
Sistem Kendali Loop Tertutup dan Sistem Kendali Loop Terbuka
Feedback Control Systems
Suatu sistem yang mempertahankan hubungan antara output dan input referensi yang ditentukan dengan membandingkannya dan menggunakan perbedaannya sebagai sarana kontrol disebut sistem kontrol umpan balik. Contohnya adalah sistem kontrol suhu ruangan. Dengan mengukur suhu ruangan yang sebenarnya dan membandingkannya dengan suhu referensi (suhu yang diinginkan), termostat menghidupkan atau mematikan peralatan pemanas atau pendingin sedemikian rupa untuk memastikan bahwa suhu ruangan tetap pada tingkat yang nyaman terlepas dari kondisi luar.
Feedback Control System tidak terbatas pada bidang teknik tetapi juga dapat ditemukan di berbagai bidang non-teknik. Tubuh manusia, misalnya, adalah sistem kontrol umpan balik yang sangat canggih. Suhu tubuh dan tekanan darah dijaga konstan melalui umpan balik fisiologis. Faktanya, umpan balik melakukan fungsi vital: Membuat tubuh manusia relatif tidak peka terhadap gangguan eksternal, sehingga memungkinkannya berfungsi dengan baik di lingkungan yang berubah.
Sistem Kendali Loop Tertutup
Feedback Control System sering disebut sebagai sistem kontrol loop tertutup. Dalam praktiknya, istilah kontrol umpan balik dan kontrol loop tertutup digunakan secara bergantian. Dalam sistem kontrol loop tertutup, sinyal kesalahan penggerak yang merupakan perbedaan antara sinyal masukan dan sinyal umpan balik (yang mungkin merupakan sinyal keluaran itu sendiri atau fungsi dari sinyal keluaran dan turunan dan/atau integralnya), diumpankan ke pengontrol untuk mengurangi kesalahan dan membawa keluaran sistem ke nilai yang diinginkan. Istilah kontrol loop tertutup selalu menyiratkan penggunaan tindakan kontrol umpan balik untuk mengurangi kesalahan sistem
Diagram yang menyatakan hubungan antara masukan dan keluaran dari suatu sistem loop tertutup ditunjukkan pada Gambar di bawah ini.
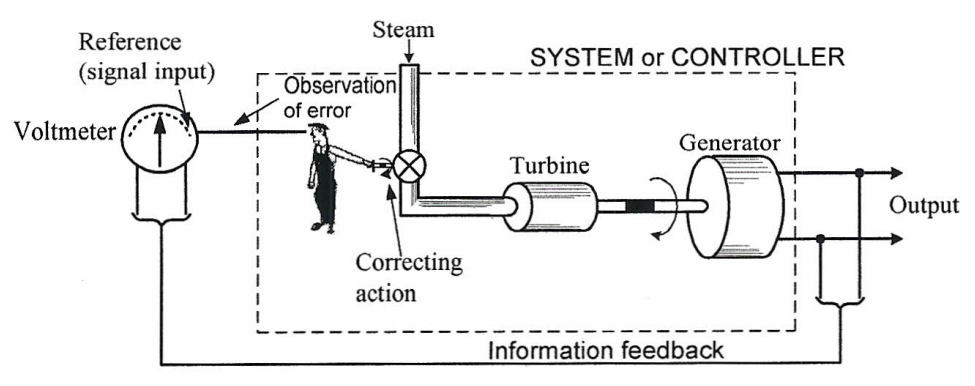
Sementara untuk memahami konsep sistem kendali loop tertutup, perhatikan sistem pengaturan tegangan keluaran generator dengan penggerak mula turbin uap sebagaimana ditujukkan pada Gambar di bawah ini.

Melalui observasi mata terhadap voltmeter yang terpasang pada terminal keluaran generator, operator dengan cepat mengetahui penyimpangan (kesalahan) jarum penunjuk tegangan dari tegangan kerja yang diharapkan (Setpoint) dan secepat itu pulalah ia harus segera bertindak untuk mengatasi kesalahan tersebut. sehingga operator harus berusaha membuat penyimpangan atau kesalahan jarum penunjuk voltmeter sekecil mungkin bahkan nol, dengan memutar handle katup pengatur catu uap ke kanan atau ke kiri tergantung arah simpangan jarum penunjuk yang sesekali lebih besar atau lebih kecil dari tegangan yang ditetapkan. Mengingat umpan-balikan keluaran (tegangan generator) selalu dibandingkan dengan masukan acuan (setpoint) dan aksi pengendalian terjadi melalui aksi operator, maka sistem ini disebut sistem kendali manual berumpan-balik (manual feedback control system) atau sistem kendali manual loop tertutup (manual closed-loop control system).
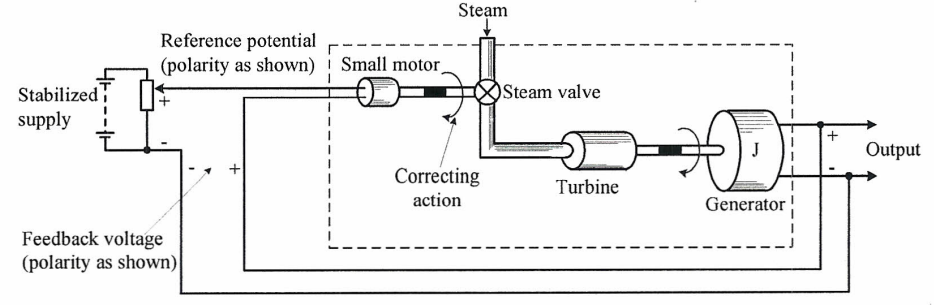
Seandainya elemen kendali automatik digunakan untuk menggantikan operator manusia seperti ditunjukkan pada Gambar di bawah ini, sistem kendali tersebut menjadi otomatis, yang biasa disebut sistem kendali otomatis berumpan-balik atau sistem kendali automatik loop tertutup. Posisi katup pengatur laju aliran uap (elemen kendali) automatik akan mengatur tekanan aliran uap guna memperoleh putaran turbin dan poros generator sehingga didapat tegangan keluaran yang diharapkan. Tegangan keluaran generator yang sebenarnya diukur dengan menggunakan voltmeter untuk dibandingkan dengan tegangan yang telah ditetapkan (sinyal referensi) sehingga dihasilkan sinyal kesalahan penggerak. Sinyal kesalahan yang dihasilkan elemen kendali automatik diperkuat, dan keluaran elemen kendali dikirim ke motor kecil mengubah posisi katup aliran catu uap pengatur putaran turbin dan poros generator untuk mengoreksi tegangan keluran yang sebenarnya. Jika tidak terdapat penyimpangan atau kesalahan tegangan, maka tidak terjadi perubahan posisi katup pengatur aliran catu uap.
Pengendalian suatu sistem yang kompleks dengan operator manusia sangat tidak efektif, karena terdapat beberapa timbal-balik antara beberapa variable. Kita ketahui bahwa, dalam sistem yang sederhanapun sistem kendali automatik dapat menghilangkan setiap kesalahan operasi yang disebabakan oleh manusia. Dengan kata lain bila memerlukan pengendalian presisi tinggi, pengendalian sistem harus automatik. Beberapa contoh antara lain semua sistem servomekanisme, sistem pengendali proses, pemanas air automatik, almari es, sistem pemanas ruangan automatik dengan termostatik, dan sebagainya.
Open-Loop Control Systems.
Sistem yang outputnya tidak berpengaruh pada aksi kontrol disebut sistem kontrol loop terbuka. Dengan kata lain, dalam sistem kontrol loop terbuka keluaran tidak diukur atau diumpan balik untuk dibandingkan dengan masukan. Salah satu contoh praktisnya adalah mesin cuci. Perendaman, pencucian, dan pembilasan dalam mesin cuci beroperasi berdasarkan waktu. Mesin tidak mengukur sinyal keluaran, yaitu kebersihan pakaian
Dalam setiap sistem kontrol loop terbuka keluaran tidak dibandingkan dengan masukan referensi. Jadi, untuk setiap input referensi ada kondisi operasi tetap yang sesuai; akibatnya, keakuratan sistem bergantung pada kalibrasi. Apabila terjadi gangguan, sistem kontrol loop terbuka tidak akan melakukan tugas yang diinginkan. Kendali lup terbuka dapat digunakan, dalam praktiknya, hanya jika hubungan antara input dan output diketahui dan jika tidak ada gangguan internal maupun eksternal. Jelas, sistem seperti itu bukanlah sistem kontrol umpan balik. Perhatikan bahwa setiap sistem kontrol yang beroperasi berdasarkan waktu adalah loop terbuka. Misalnya, kontrol lalu lintas melalui sinyal yang dioperasikan berdasarkan waktu adalah contoh lain dari kontrol loop terbuka.
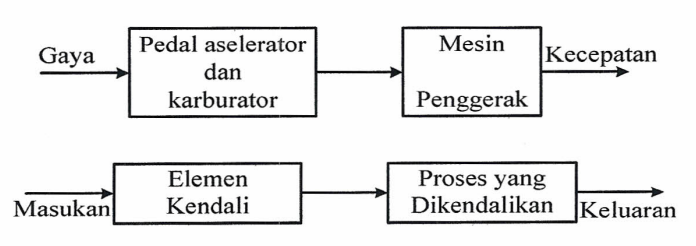
Gambar di bawah ini. menunjukkan hubungan masukan-keluaran suatu sistem kendali loop terbuka. Sebuah contoh praktis adalah mesin cuci (washing machine). Sejak perendaman, pencucian dan pembilasan pada mesin cuci ini tidak mengukur sinyal keluaran, misalnya kebersihan pakaian yang dicuci. Contoh lain yaitu pengendalian atau pengaturan lampu lalu-lintas yang operasinya juga berdasarkan basis waktu. Pada sistem ini tidak memperhitungkan perubahan arus lalu-lintas yang terjadi pada setiap persimpangan jalan. Tepatnya adalah kendaraan yang dapat lewat saat lampu hijau menyala tidak harus sama dengan banyaknya kendaraan yang masuk atau antri pada ruas jalan yang bersangkutan, karena dibatasi oleh waktu nyala lampu yang sudah ditetapkan.
Jadi pada sistem kendali loop terbuka, keluaran tidak dibandingkan dengan masukan acuannya. OIeh sebab itu, untuk setiap masukan acuan terdapat suatu kondisi operasi yang tetap. Perlu diketahui bahwa sistem kendali loop terbuka harus dikalibrasi dengan hati-hati, agar ketelitian sistem tetap terjaga dan berfungsi dengan baik. Dengan adanya gangguan (disturbances), sistem kendali loop terbuka tidak dapat bekerja seperti yang diharapkan. Kendali loop terbuka dapat digunakan dalam praktek hanya jika hubungan masukan dan keluaran diketahui dan jika tidak terdapat gangguan internal maupun gangguan eksternal. Dengan demikian jelas bahwa sistem semacam ini bukan sistem kendali berumpan-balik. Demikian pula bahwa setiap sistem kendali yang bekerja berdasar basis waktu adalah sistem loop terbuka.
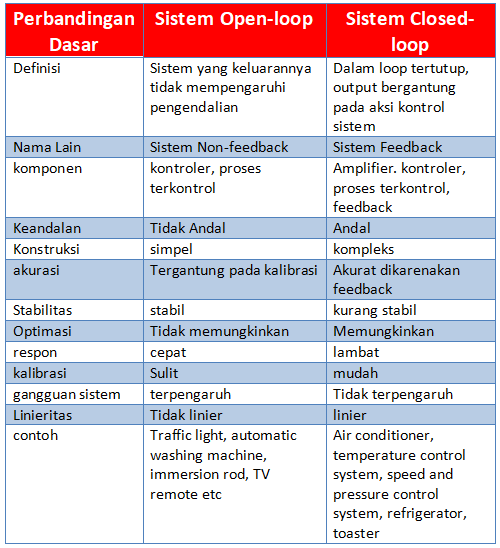
Closed-Loop versus Open-Loop Control Systems.
Keuntungan dari sistem kontrol loop tertutup adalah fakta bahwa penggunaan umpan balik membuat respon sistem relatif tidak sensitif terhadap gangguan eksternal dan variasi internal parameter sistem. Dengan demikian dimungkinkan untuk menggunakan komponen yang relatif tidak akurat dan murah untuk mendapatkan kontrol yang akurat dari instalasi tertentu, sedangkan hal itu tidak mungkin dilakukan dalam kasus loop terbuka.
Dari sudut pandang stabilitas, sistem kontrol lup terbuka lebih mudah dibangun karena stabilitas sistem bukanlah masalah utama. Di sisi lain, stabilitas adalah masalah utama dalam sistem kontrol loop tertutup, yang cenderung mengoreksi kesalahan secara berlebihan dan dengan demikian dapat menyebabkan osilasi amplitudo konstan atau berubah.
Perlu ditekankan bahwa untuk sistem yang inputnya diketahui sebelumnya dan tidak ada gangguan, disarankan untuk menggunakan kontrol lup terbuka. Sistem kontrol loop tertutup memiliki keuntungan hanya ketika ada gangguan yang tidak dapat diprediksi dan/atau variasi yang tidak dapat diprediksi dalam komponen sistem. Perhatikan bahwa tingkat daya keluaran sebagian menentukan biaya, berat, dan ukuran sistem kontrol. Jumlah komponen yang digunakan dalam sistem kontrol loop tertutup lebih banyak daripada sistem kontrol loop terbuka. Dengan demikian, sistem kontrol loop tertutup umumnya lebih tinggi biaya dan dayanya. Untuk mengurangi daya yang dibutuhkan sistem, kontrol loop terbuka dapat digunakan jika memungkinkan. Kombinasi yang tepat dari kontrol loop terbuka dan loop tertutup biasanya lebih murah dan akan memberikan kinerja sistem yang memuaskan secara keseluruhan.
Sebagian besar analisis dan desain sistem kontrol yang disajikan dalam buku ini berkaitan dengan sistem kontrol loop tertutup. Dalam keadaan tertentu (seperti di mana tidak ada gangguan atau output sulit diukur) sistem kontrol loop terbuka mungkin diinginkan. Oleh karena itu, ada baiknya meringkas keuntungan dan kerugian menggunakan sistem kontrol loop terbuka.
Keuntungan utama dari sistem kontrol loop terbuka adalah sebagai berikut:
1. Konstruksi sederhana dan perawatan yang mudah.
2. Lebih murah daripada sistem loop tertutup.
3. Tidak ada masalah stabilitas.
4. Lebih cocok untuk hasil output yang sulit diukur atau secara ekonomi pengukuran keluaran secara akurat tidak terlalu dibutuhkan. (Misalnya, dalam sistem mesin cuci, akan cukup mahal untuk menyediakan perangkat yang dapat mengukur kualitas kebersihan hasil cucian).
Kekurangan utama dari sistem kontrol loop terbuka adalah sebagai berikut:
1. Gangguan dan perubahan dalam kalibrasi menyebabkan error, dan hasilnya mungkin berbeda dengan yang diinginkan
2. Kalibrasi ulang diperlukan dari waktu ke waktu untuk tetap menjaga hasil kualitas output.
Last modified: Friday, 11 August 2023, 3:34 PM
